Work Experience
A concise look at the roles, systems, and technical work I have owned across healthcare AI, embedded hardware, robotics, and engineering evaluation.
CareFuse
May 2024–PresentCo-founder & Software Lead
Problem: Payers and providers needed transparent, evidence-based predictions for knee replacement outcomes — with explainability and workflow fit.
Approach: Build a production ML pipeline from curated datasets through training, validation, deployment, and iteration driven by real healthcare user feedback.
My contribution: Owned the full ML stack: dataset design and pipelines, calibrated models (e.g. logistic regression with propensity weighting), SHAP explanations, FastAPI + Docker deployment, FHIR/Da Vinci PAS integration, and internal tooling.
Impact: AUC ≈ 0.93 with calibration; SHAP-backed explanations for audits; enabled pilot with a major health insurer; platform ready for InterQual/MCG and ePA workflows.
Stanley Black & Decker (DeWALT)
Jun–Aug 2024Electrical Engineering Intern
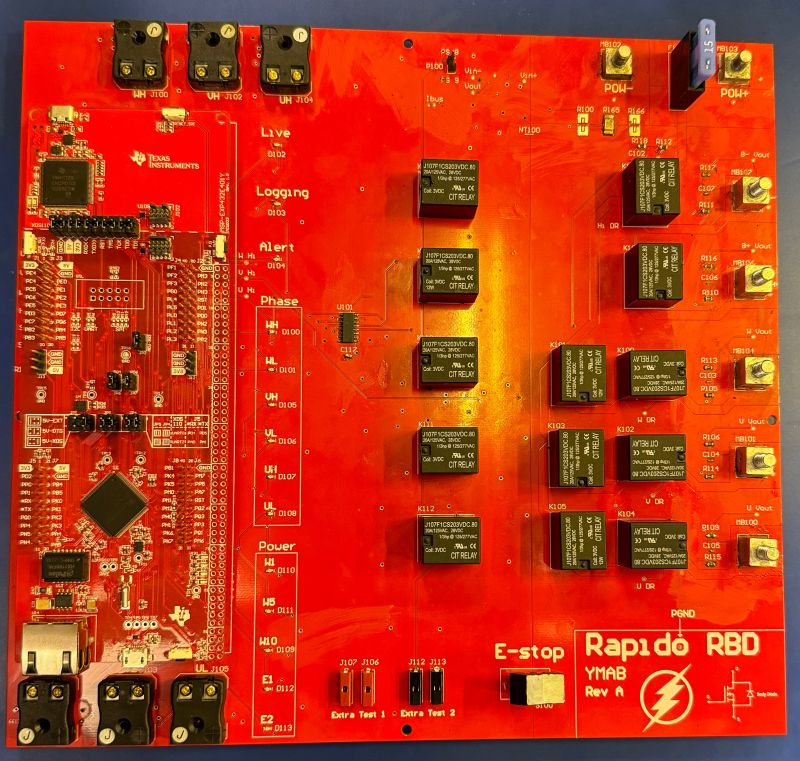
Problem: Manual testing of relay/driver/thermocouple subsystems was slow, error-prone, and hard to repeat.
Approach: Design and build an automated test fixture with custom hardware and firmware so tests could run end-to-end with logging and a simple operator interface.
My contribution: Designed and built the full fixture: mechanical fixturing, wiring, enclosure, and a custom Altium PCB for communications and power. Wrote embedded C on a microcontroller to automate the test sequence, collect and log data, and provide a user-friendly run/monitor interface.
Impact: Reduced test cycle time by ~4 hours; improved repeatability and reliability of validation.

Center for Marine Autonomy & Robotics (CMAR)
Aug 2024–Aug 2025Undergraduate Researcher — Electrical System Lead, Autonomous RHIB
Problem: The autonomous hydrofoil RHIB needed a safe, robust electrical architecture and component selection to support autonomous capability and real-world marine operation.
Research: Led extensive market research on motors, microcontrollers, throttles, CAN modules, batteries, and marine-rated components. Read datasheets and technical specs in depth to select parts that met performance, safety, and environmental requirements.
Design: Designed the electrical system architecture for the RHIB with redundancy, electrical safety, and reliability in mind. Ensured the system could support autonomous operation and withstand marine conditions.
Integration: Integrated autonomous capability via CAN communication. Connected sensors, actuators, and compute so the vehicle could operate autonomously while maintaining a safe, maintainable electrical backbone.
Impact: Delivered a production-ready electrical design that enabled CMAR's autonomous RHIB program to move forward with a safe, redundant, and real-world-reliable system.
Electrical Design and AI Evaluation Work
2024-PresentElectrical Design Engineer and AI Evaluation Contributor
Problem: AI engineering tools can sound correct while missing validation detail, circuit constraints, or simulation quality.
Approach: Design and simulate circuits, then evaluate AI-generated engineering work against practical electrical design standards.
My contribution: Built and reviewed analog/digital circuit work in KiCad, LibrePCB, Qucs-S, and Ngspice; created evaluation guidance for PCB design, simulation methodology, troubleshooting, and technical reasoning.
Impact: Improved consistency and reliability for AI-assisted electrical engineering outputs while sharpening my own circuit simulation and review workflow.
Virginia Tech ECE Department
Jan 2024–May 2024Undergraduate Teaching Assistant
Problem: Students needed clear explanations and debugging support for embedded concepts and microcontroller code.
Approach: Offer office hours, demos, and structured support; design a final project that tied concepts together.
My contribution: Taught embedded concepts and helped students debug code; developed most of the ECE2564 (Embedded Systems) final project.
Impact: Stronger student outcomes and a reusable, meaningful capstone project for the course.
Terrestrial Robotics Engineering & Controls (TREC) Lab
Aug 2022–May 2024Undergraduate Researcher
Problem: Mechatronic and robotics systems needed reliable, low-level data from force sensors, encoders, and CAN-based subsystems.
Approach: Design a sensor shield and firmware for force acquisition, filtering/calibration, CAN messaging, and encoder interfaces so control and research code could rely on clean data.
My contribution: Built sensor shield and drivers for force acquisition with filtering and calibration; implemented CAN messaging and encoder interfaces (quadrature and absolute); focused on reliable, real-time data capture for control systems.
Impact: Reliable data pipeline for TREC's mechatronic and robotics projects; cross-disciplinary experience in control, sensors, and electrical subsystem design.